 |

Montiere den Minicomputer auf deinem Spurensucher
Wenn du den Minicomputer auf deinem Spurensucher montiert hast, wird der Spurensucher zum Roboter.
|
 |
Material:
- Minicomputer (Leiterplatte)
- Doppelklebebandstreifen
- Spurensucher
- Handy oder Tablet
- Silikonschlauch
- Rasterblatt
|
 |
- Ziehe alle Kabel aus dem Hohlkammerplattenstück.
|
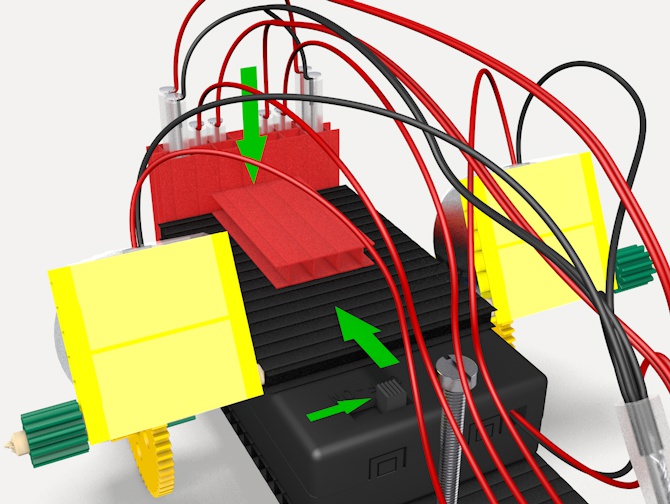 |
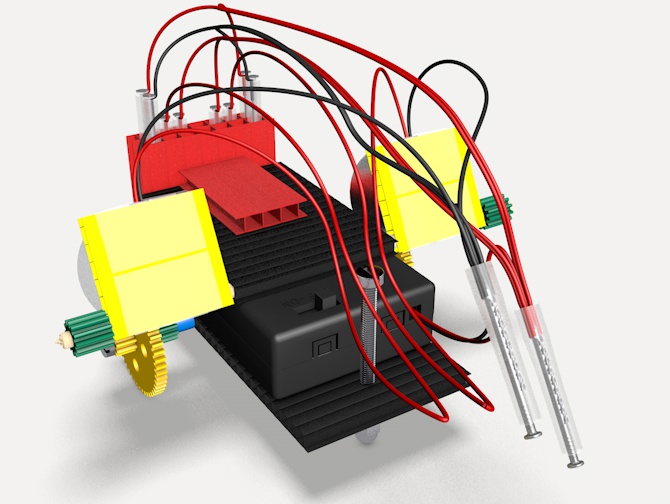
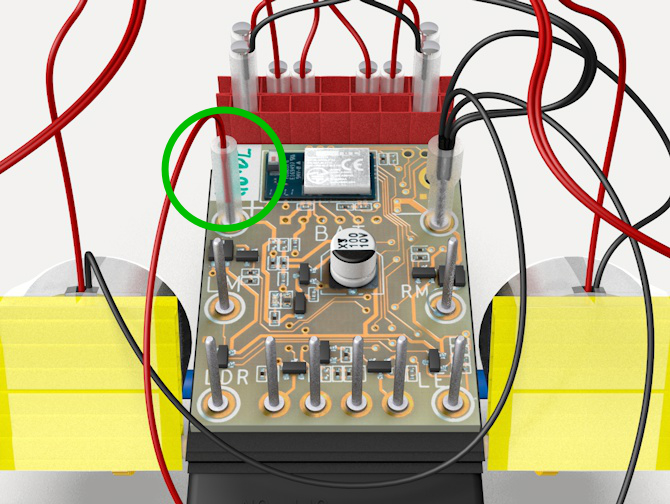
- Schiebe den Schalter des Batteriehalters auf «OFF».
- Öffne den Batteriehalter, indem du auf der hinteren Seite des Spurensucher drückst und gleichzeitig das obere Element nach vorne schiebst (beachte die grüne Markierung).
|
 |
- Entferne die Schraube und lege eine Batterie ein. Achte auf die Bezeichnung der Pole der Batterie.
- Verschliesse den Batteriehalter wieder. Vielleicht musst du etwas auf die vordere Kante des Batteriehalters drücken.
|
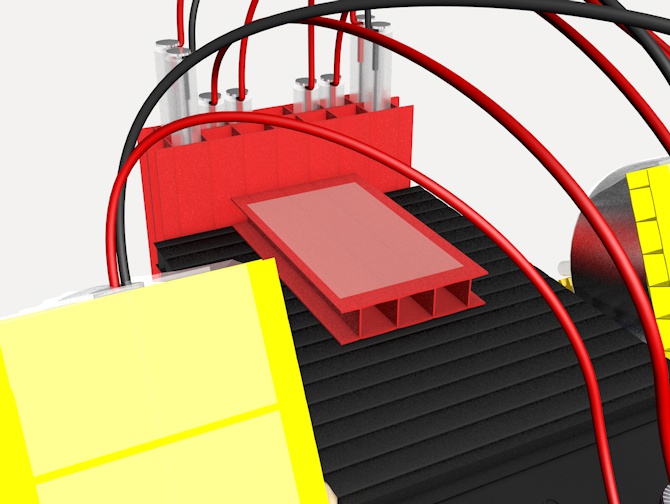 |
- Klebe ein 1.5 cm breites Stück Doppelklebeband auf das rote Hohlkammerplattenstück. Löse die Schutzfolie ab.
|
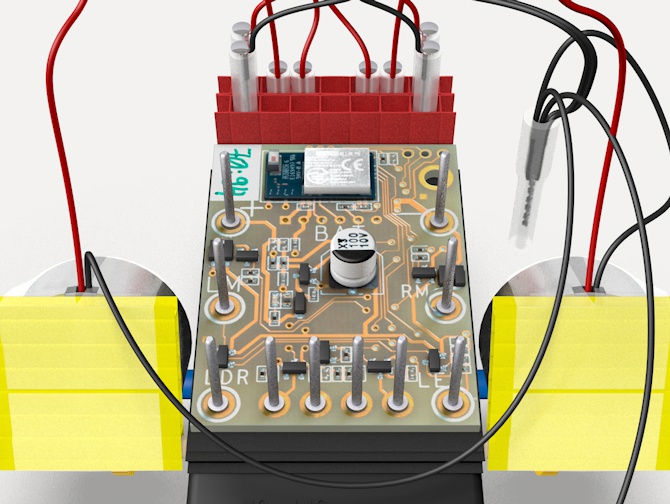 |
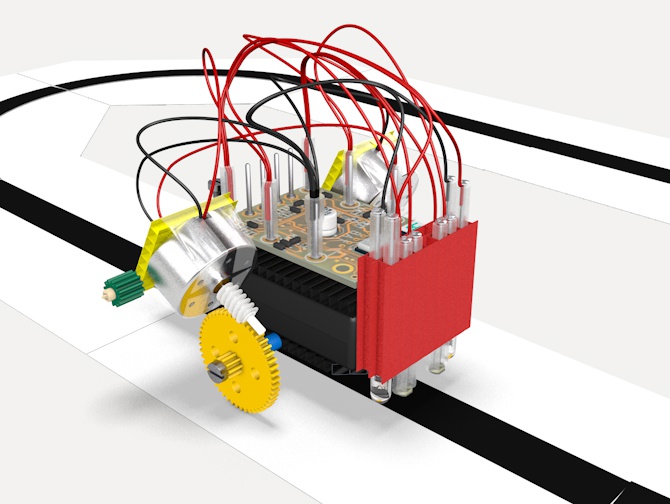
- Klebe den Minicomputer (Leiterplatte) auf das Hohlkammerplattenstück. Achte darauf, dass die Leiterplatte genau in der Mitte ist und die Lichtsteuerung berührt.
- Achtung: Die Reihe mit den 6 Stiften ist hinten.
|
 |
- Entferne den Nagel bei den schwarzen Kabeln.
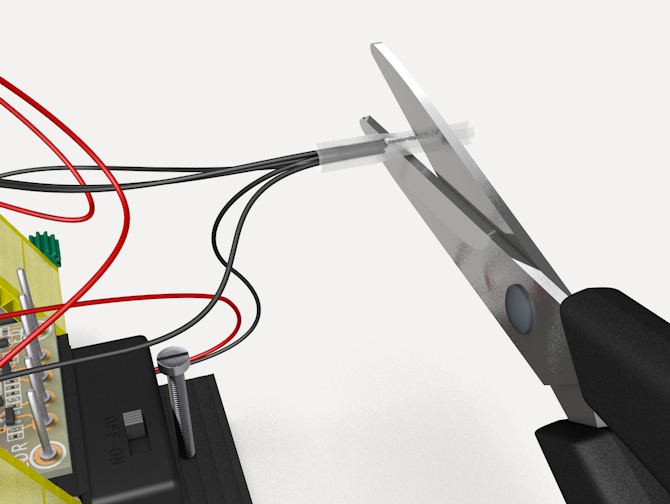
- Schiebe die schwarzen Kabel möglichst tief in den Silikonschlauch hinein. Das geht am besten, wenn du die Kabel drehst und dabei in den Schlauch drückst.
- Verkürze den Silikonschlauch zusammen mit den Drähten auf 1.5 cm.
|
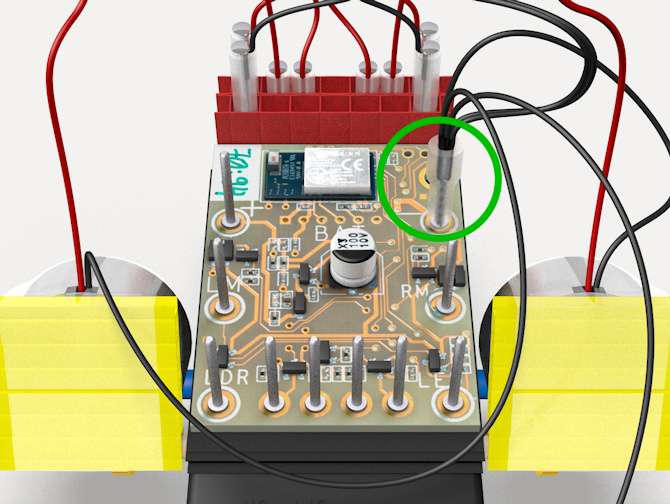 |
- Stecke den Silikonschlauch mit den schwarzen Kabeln auf den «- BAT» – Stift der Leiterplatte.
|
 |
- Entferne den Nagel bei den roten Kabeln.
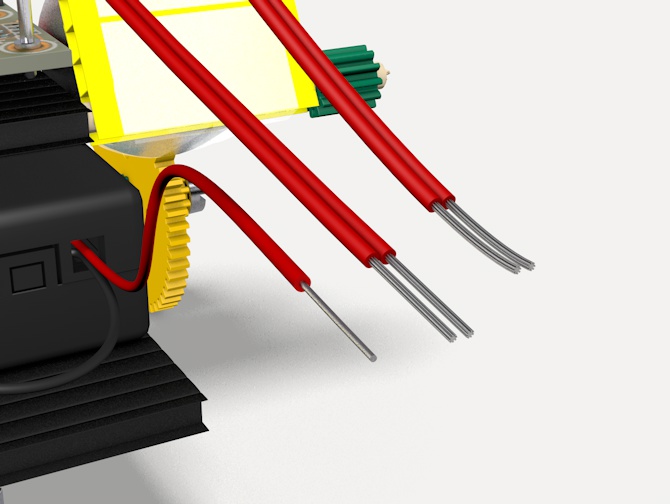
- Ziehe die roten Kabel aus dem Silikonschlauch.
- Drehe die roten Kabel auseinander, so, dass du zwei Doppellitzen und eine Einfachlitze hast.
|
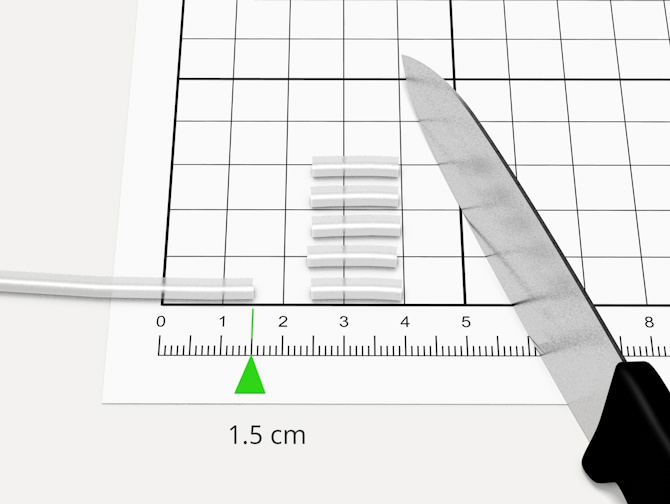 |
- Schneide 5 Stücke Silikonschlauch von 1.5 cm Länge ab.
|
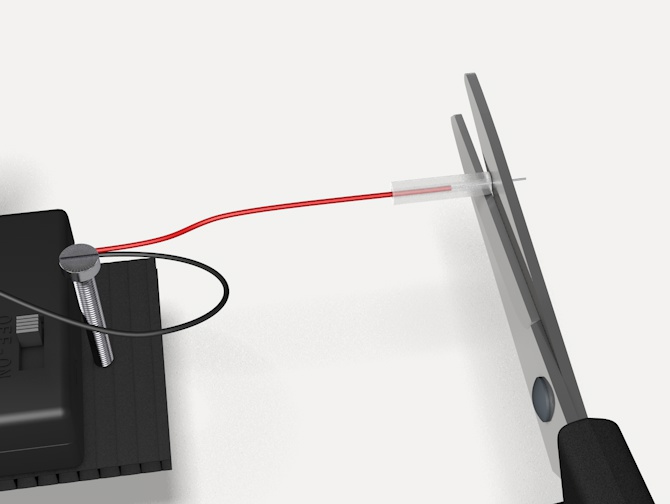 |
- Stecke auf das rote Kabel des Batteriehalters ein 1.5 cm langes Stück Silikonschlauch bis die Isolation in der Hälfte des Silikonschlauchs ist.
- Schneide die herausstehenden Drähtchen ab.
|
 |
- Stecke den Silikonschlauch mit dem roten Kabel auf den «+ BAT» – Stift auf der Leiterplatte.
|
 |
- Stecke auf die roten Kabelenden der LDR-Doppellitze ein 1.5 cm langes Stück Silikonschlauch, bis die Isolation in der Mitte des Schlauches ist.
- Schneide mit der Schere die hervorstehenden Drähtchen weg.
- Stecke den Schlauch mit der Litze auf den
«LDR» – Stift auf der Leiterplatte.
|
 |
- Stecke auf die Kabelende der LED-Doppellitze ein
1.5 cm langes Stück Silikonschlauch, bis die Isolation in der Mitte des Schlauches ist.
- Schneide mit der Schere die hervorstehenden Drähtchen weg.
- Stecke den Schlauch mit der Litze auf den
«LED» – Stift auf der Leiterplatte.
|
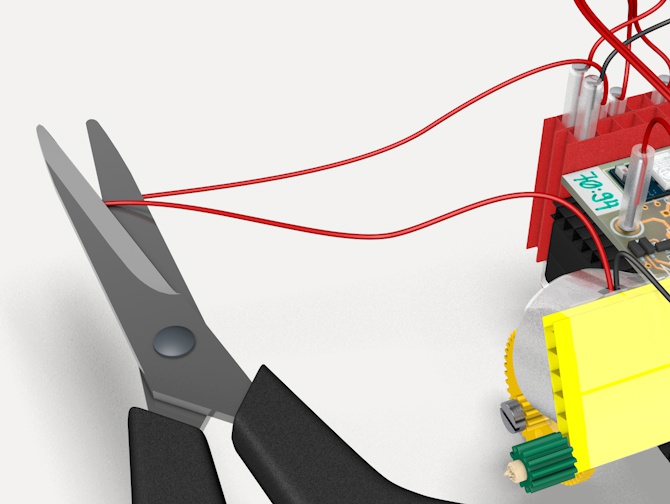 |
- Halbiere das rote Kabel des linken Motors, isoliere
1 cm ab, verdrehe die Drähte und stecke sie in ein
1.5 cm langes Stück Silikonschlauch.
|
 |
- Stecke den Silikonschlauch auf den Stift des linken Motors auf der Leiterplatte.
Der Stift ist mit «LM» bezeichnet.
|
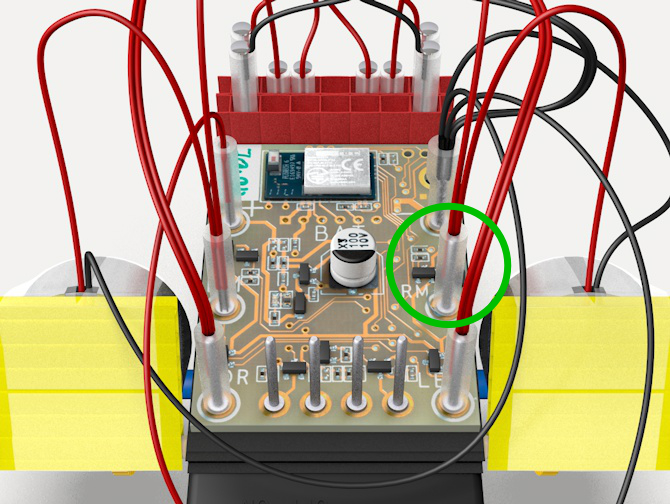 |
- Mache das Gleiche mit dem rechten Motor und stecke den Silikonschlauch auf den Stift des rechten Motors auf der Leiterplatte.
Der Stift ist mit «RM» bezeichnet.
|
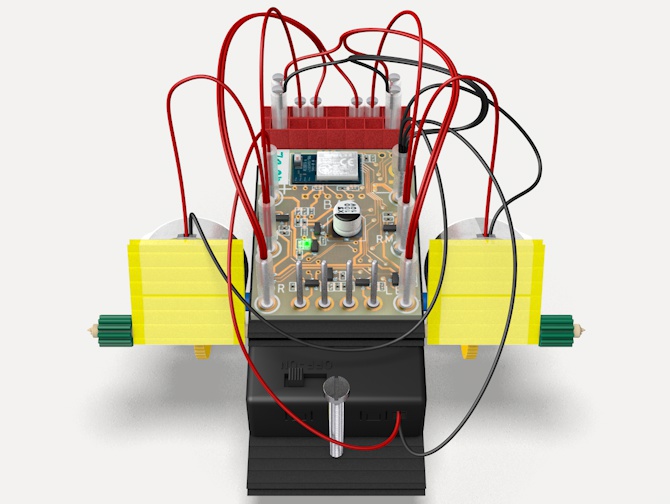 |
- Schiebe den Schalter des Batteriehalters auf «ON».
- Nun leuchtet die grüne LED auf der Leiterplatte.
|
 |
Verbinde dein Handy oder Tablet mit dem Roboter und lass ihn starten und stoppen
- Drücke auf das Bluetooth-Icon deiner App (grüne Markierung).
|
 |
- Wähle deinen Roboter aus und drücke «OK».
- Wenn du mehrere Möglichkeiten hast, wählst die Bezeichnung aus, die auf der weissen Fläche des Minicomputers auf deinem Roboter zu sehen ist.
|
 |
- Nun erscheint oben rechts auf deinem Bildschirm die Bezeichnung deines Roboters.
- Immer wenn du diese Bezeichnung siehst, besteht eine Verbindung von deinem Handy oder Tablet zu deinem Roboter.
|
 |
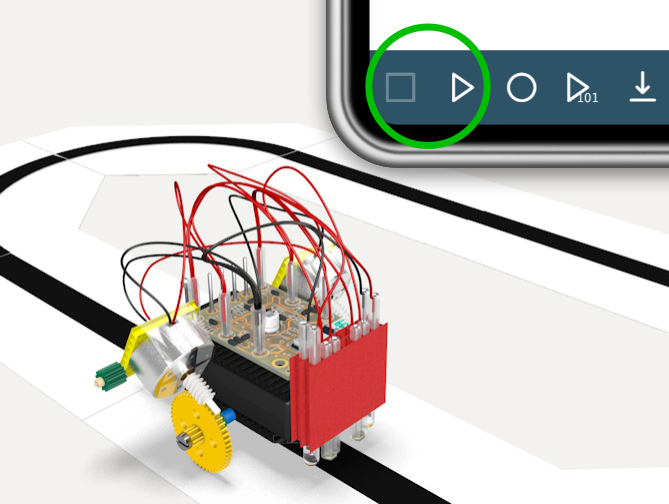
- Nun kannst du mit dem Button «Start» (Dreieck) und dem Button «Stopp» (Quadrat) deinen Roboter starten und stoppen, wie du willst: Du kannst die Motoren also aus der Ferne ein- und ausschalten.
|
 |
Zeichne die Fahrt deines Roboters auf und überprüfe, ob er «gut gelernt» hat
- Baue mit den Papierschienen eine spannende Bahn.
- Stelle den Roboter darauf.
- Prüfe mit «Start» und «Stopp», ob der Spurensucher genau der Spur folgt.
- Zähle, wie viele Sekunden die Fahrt dauert.
|
 |
- Öffne das Menü «Einstellungen».
|
 |
- Stelle bei «Dauer» die Anzahl Sekunden ein, welche die Fahrt gedauert hat.
- Den Wert «1» bei «Intervall» veränderst du nicht.
- Schliesse das Menü «Einstellungen» mit «x».
|
 |
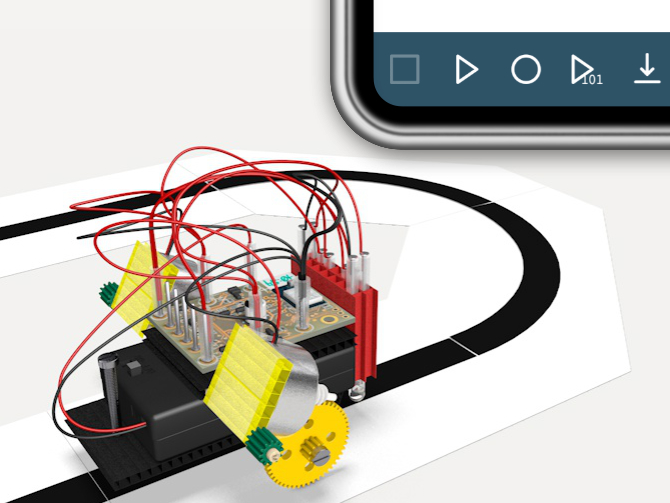
- Drücke den Button «Aufzeichnen» (Kreis).
- Der Roboter wird nun automatisch gestartet und fährt so viele Sekunden, wie du eingestellt hast - und stoppt dann wieder.
- Die Fahrt wird aufgezeichnet und als Programm auf dem Minicomputer gespeichert.
- Das Programm bleibt solange gespeichert, bis du eine neue Fahrt aufzeichnest.
|
 |
- Stelle den Roboter neben deine Bahn. Er soll nun zeigen, dass er die Fahrt aufgezeichnet hat und ohne Papierlinie fahren kann.
- Starte die Fahrt des Roboters mit dem Button «Wiedergeben» (Dreieck101).
|
 |
Experiment
- Versuche das Gleiche mit anderen Strecken.
- Stelle deinem Roboter eine möglichst schwierige Aufgabe.
|
 |
Willst du sehen, was der Roboter aufgezeichnet hat? |
 |
Wenn es dich interessiert, wie das Programm aussieht, das der Roboter aufgezeichnet hat, musst du es auf dein Handy oder Tablet laden.
- Drücke auf den Button «Download» (Pfeil nach unten).
- Warte bis der Download bestätigt wird.
|
 |
- Auf deinem Handy oder Tablet siehst du nun das aufgezeichnete Programm.
- Überlege, wie es zu verstehen ist!
|
 |
- Es besteht aus vielen Zeilen mit je zwei Zahlen.
- Die Zahlen sind Werte für die Geschwindigkeit der Motoren. Die Werte liegen zwischen 0 und 100.
100 ist der Wert für die maximale Geschwindigkeit.
- Die linke Spalte zeigt die Werte für den linken Motor, die rechte die Werte für den rechten Motor.
- Aufgrund der Zahlenwerte kannst du erkennen, wann der Roboter geradeaus, eine Kurve nach links oder nach rechts gefahren ist und ob die Kurve eng oder weit war.
- Und du siehst, ob der Roboter eher schnell oder eher langsam unterwegs war.
|
 |
- Weil bei «Intervall» (im Menü «Einstellungen»)
die Zahl 1 eingetragen ist, wurde pro Sekunde Fahrt eine Programmzeile aufgezeichnet.
- Die Anzahl Zeilen entspricht somit der Länge der aufgezeichneten Fahrt in Sekunden.
|






